

The Challenge
Everyday Robots must operate inside human spaces to provide tangible value in the real-world. Placing high-velocity, high-mass machinery creates a dual problem:
In order to create trust, predictability, and safety – a robust framework of communication is required that can facilitate trust between robots and the humans around them.
The Utility Gap
For an Everyday Robot to be maximally helpful, it cannot be locked behind a safety cage; it must share the same physical space as humans.
The Trust Paradox
While utility requires proximity, it also breeds human anxiety. If the robot’s intentions are unreadable, it’s perceived as “frightening” instead of helpful.
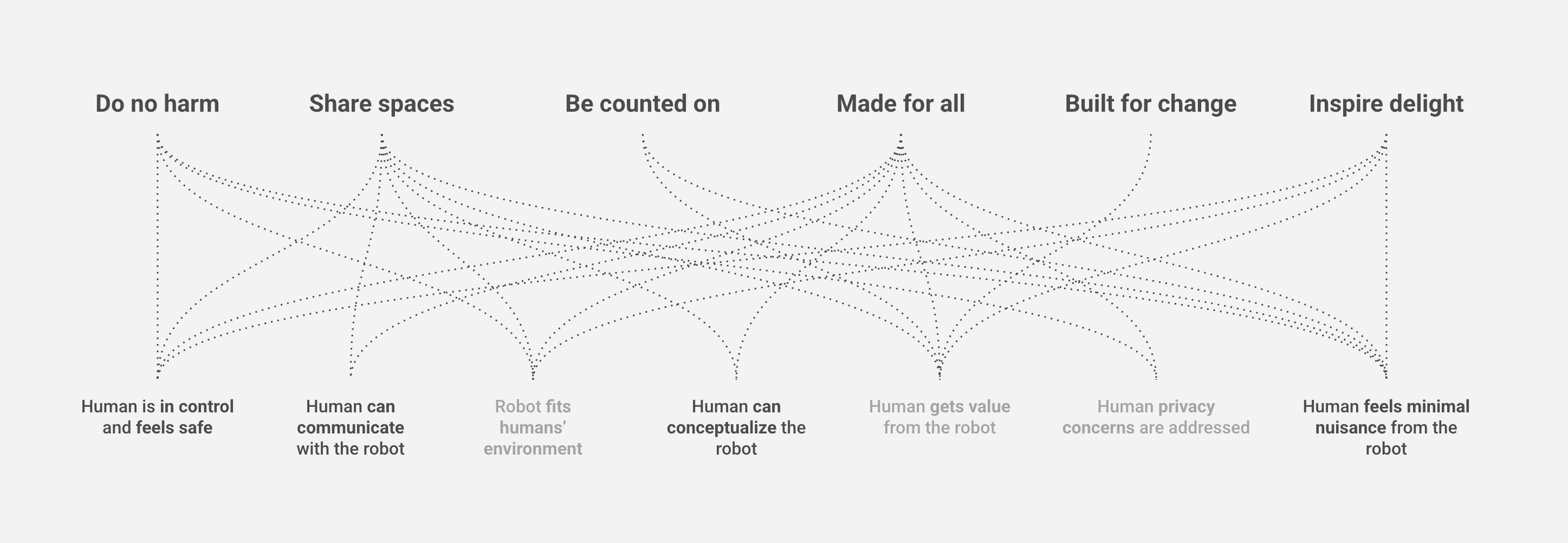
A Framework for Human-Robot Interaction
Starting with the project’s mission and goals, I worked with a team of researchers and engineers to identify and map key pillars of interaction between humans and robots that we would need to manage. These pillars guided our future work on both the physical design of the robot and its behavioral principles.
Architecting Transparency At-A-Glance
The Earnest Robot
Established an “Earnest Robot” persona that prioritizes predictable, well-intentioned behaviors over raw mechanical efficiency to cultivate human trust in shared spaces.
Multimodal Gaze
Engineered a “Gaze” logic using a physical head to broadcast intent and attention, favoring psychological legibility over mechanical simplicity.
Holistic Motion Language
Architected motion-as-communication principles, utilizing approach arcs and deceleration patterns to broadcast the robot’s awareness and intended pathing.
Combining these two systems into a “Pointer + Status” syntax unlocked the ability to quickly communicate specific contextual intent to nearby at a distance.
The Directional Head
We advocated for the implementation of a physical directional head with a full range of motion, despite it creating LiDAR blind spots and increasing mechanical weight. Working closely with the engineering team, we negotiated the mechanical and psychological efficiency demands that we required.
The Emoji Lexicon
We architected a color-coded and motion-based grammar system and designed a library of lo-res animations to encapsulate complex semantic meanings into language-agnostic signals that could be displayed on a head-mounted emissive light ring. The ring was designed to be legible from a distance, and from any angle.